monster_pathfind Class Reference
#include <mon-pathfind.h>
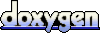
Collaboration diagram for monster_pathfind:
Public Member Functions | |
| monster_pathfind () | |
| virtual | ~monster_pathfind () |
| void | set_range (int r) |
| coord_def | next_pos (const coord_def &p) const |
| bool | init_pathfind (const monster *mon, coord_def dest, bool diag=true, bool msg=false, bool pass_unmapped=false) |
| bool | init_pathfind (coord_def src, coord_def dest, bool diag=true, bool msg=false) |
| bool | start_pathfind (bool msg=false) |
| std::vector< coord_def > | backtrack (void) |
| std::vector< coord_def > | calc_waypoints (void) |
Protected Member Functions | |
| bool | calc_path_to_neighbours (void) |
| bool | traversable (const coord_def &p) |
| int | travel_cost (coord_def npos) |
| bool | mons_traversable (const coord_def &p) |
| int | mons_travel_cost (coord_def npos) |
| int | estimated_cost (coord_def npos) |
| void | add_new_pos (coord_def pos, int total) |
| void | update_pos (coord_def pos, int total) |
| bool | get_best_position (void) |
Protected Attributes | |
| const monster * | mons |
| coord_def | start |
| coord_def | target |
| coord_def | pos |
| bool | allow_diagonals |
| bool | traverse_unmapped |
| int | range |
| int | min_length |
| int | max_length |
| int | dist [GXM][GYM] |
| int | prev [GXM][GYM] |
| FixedVector< std::vector < coord_def >, GXM *GYM > | hash |
Constructor & Destructor Documentation
| monster_pathfind::monster_pathfind | ( | ) |
| monster_pathfind::~monster_pathfind | ( | ) | [virtual] |
Member Function Documentation
| void monster_pathfind::set_range | ( | int | r | ) |
| bool monster_pathfind::init_pathfind | ( | const monster * | mon, | |
| coord_def | dest, | |||
| bool | diag = true, |
|||
| bool | msg = false, |
|||
| bool | pass_unmapped = false | |||
| ) |
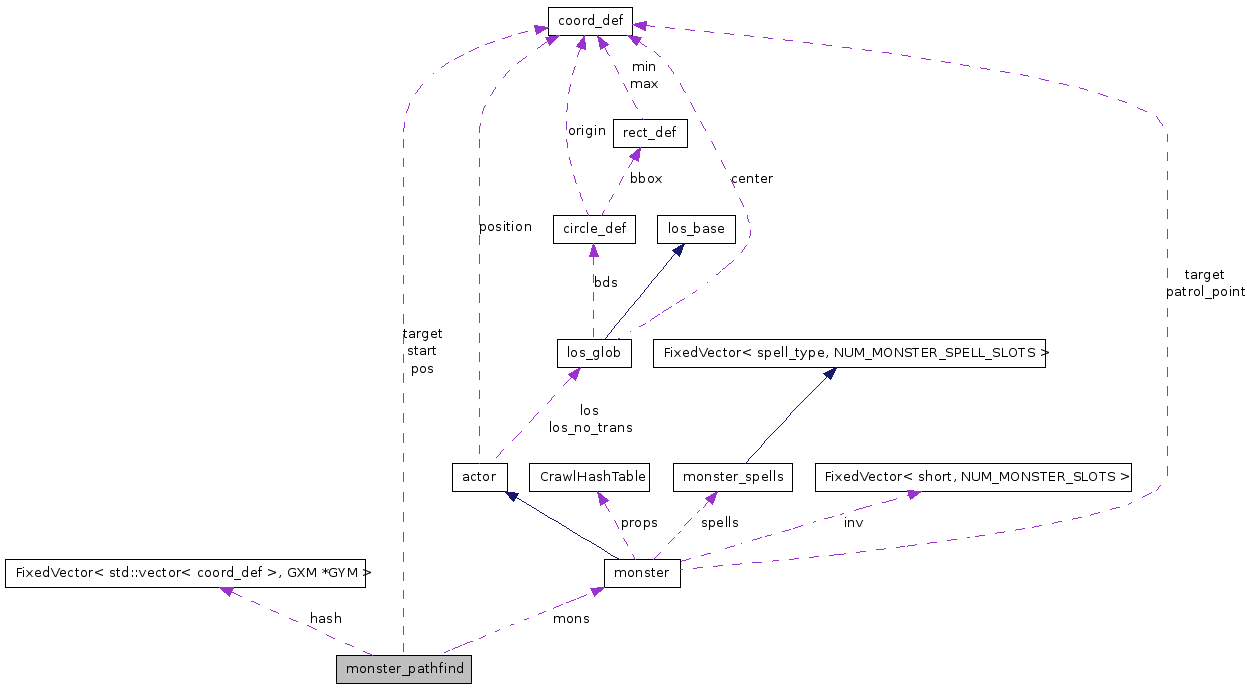
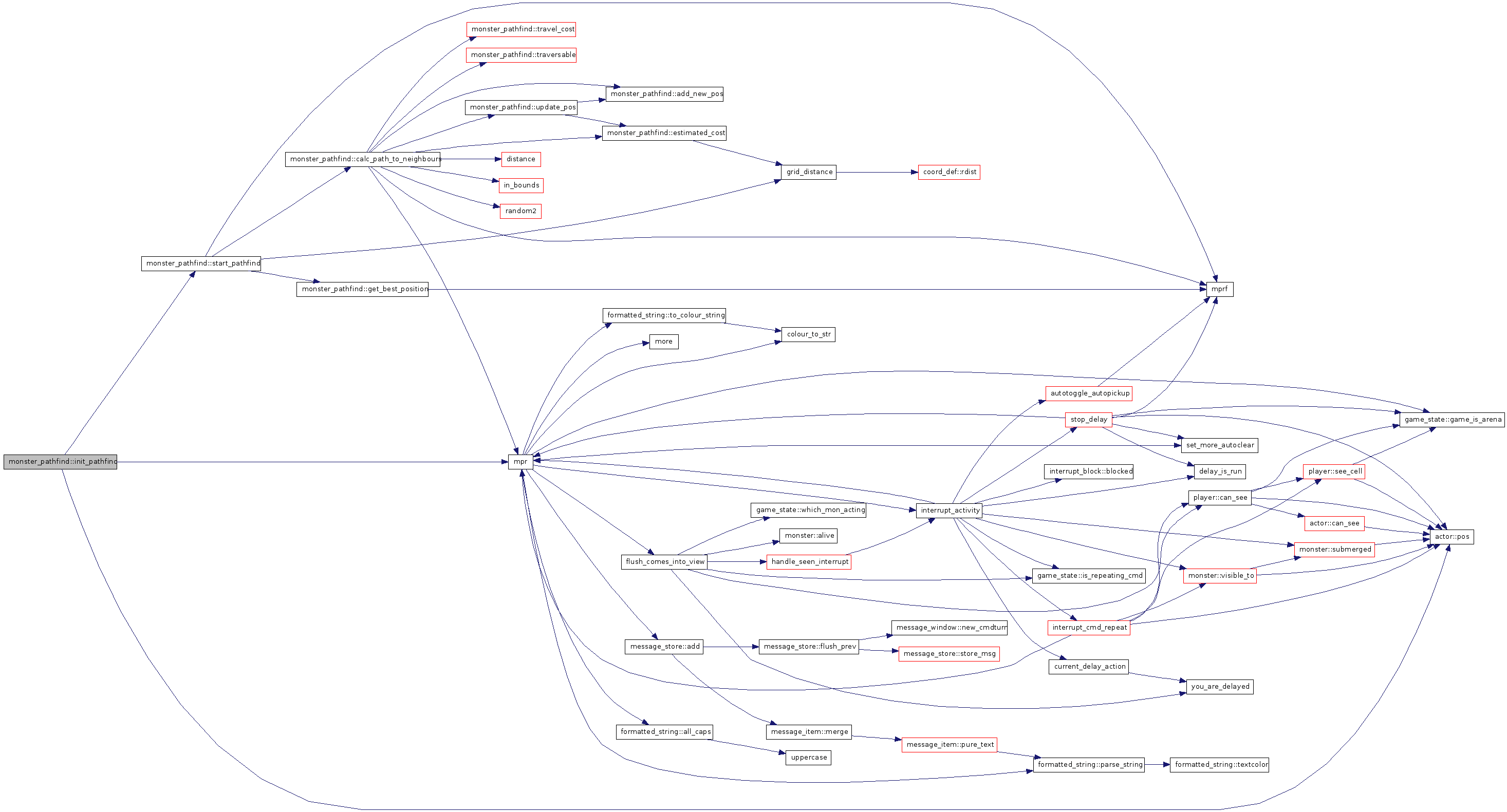
Here is the call graph for this function:
| bool monster_pathfind::init_pathfind | ( | coord_def | src, | |
| coord_def | dest, | |||
| bool | diag = true, |
|||
| bool | msg = false | |||
| ) |
Here is the call graph for this function:
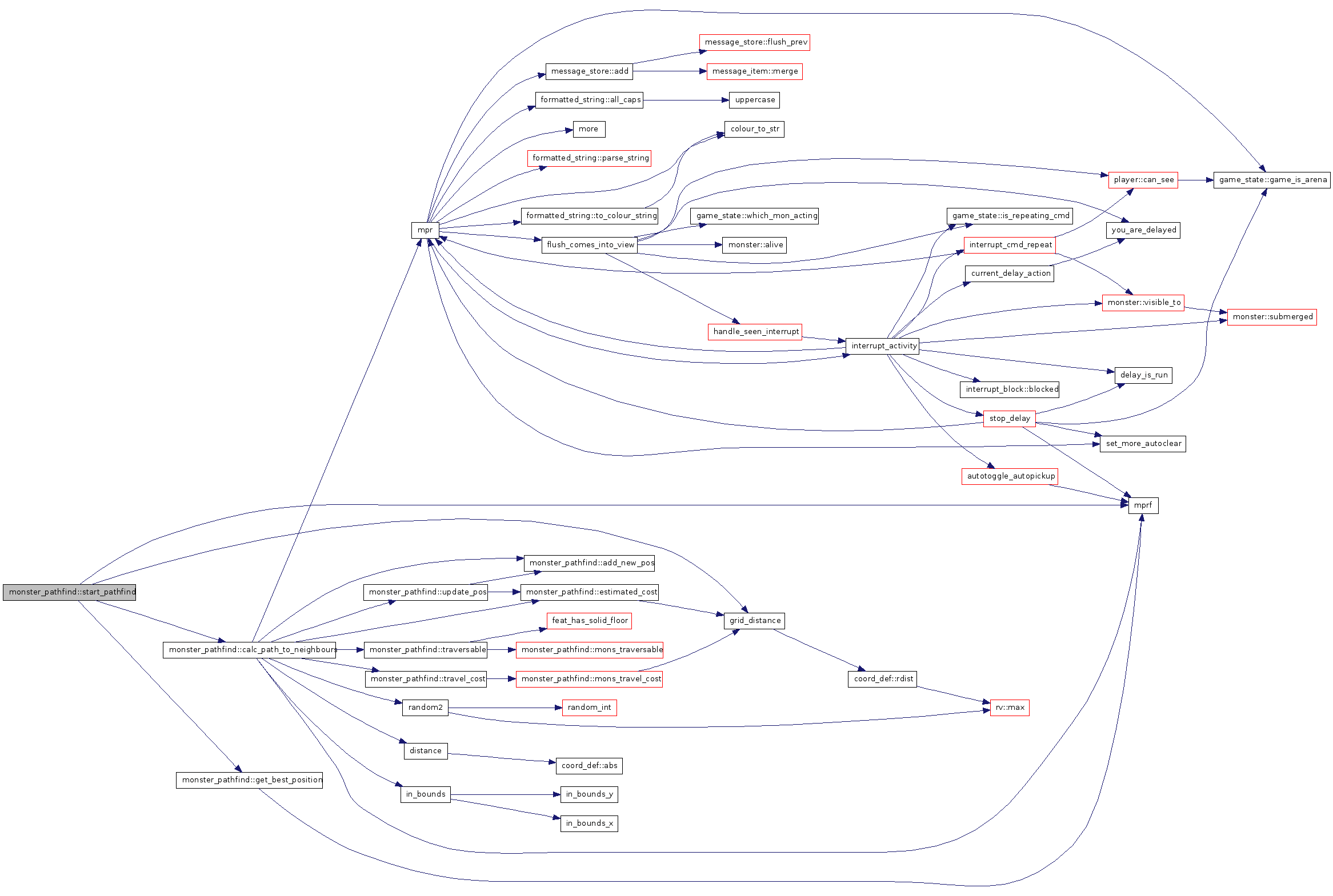
| bool monster_pathfind::start_pathfind | ( | bool | msg = false |
) |
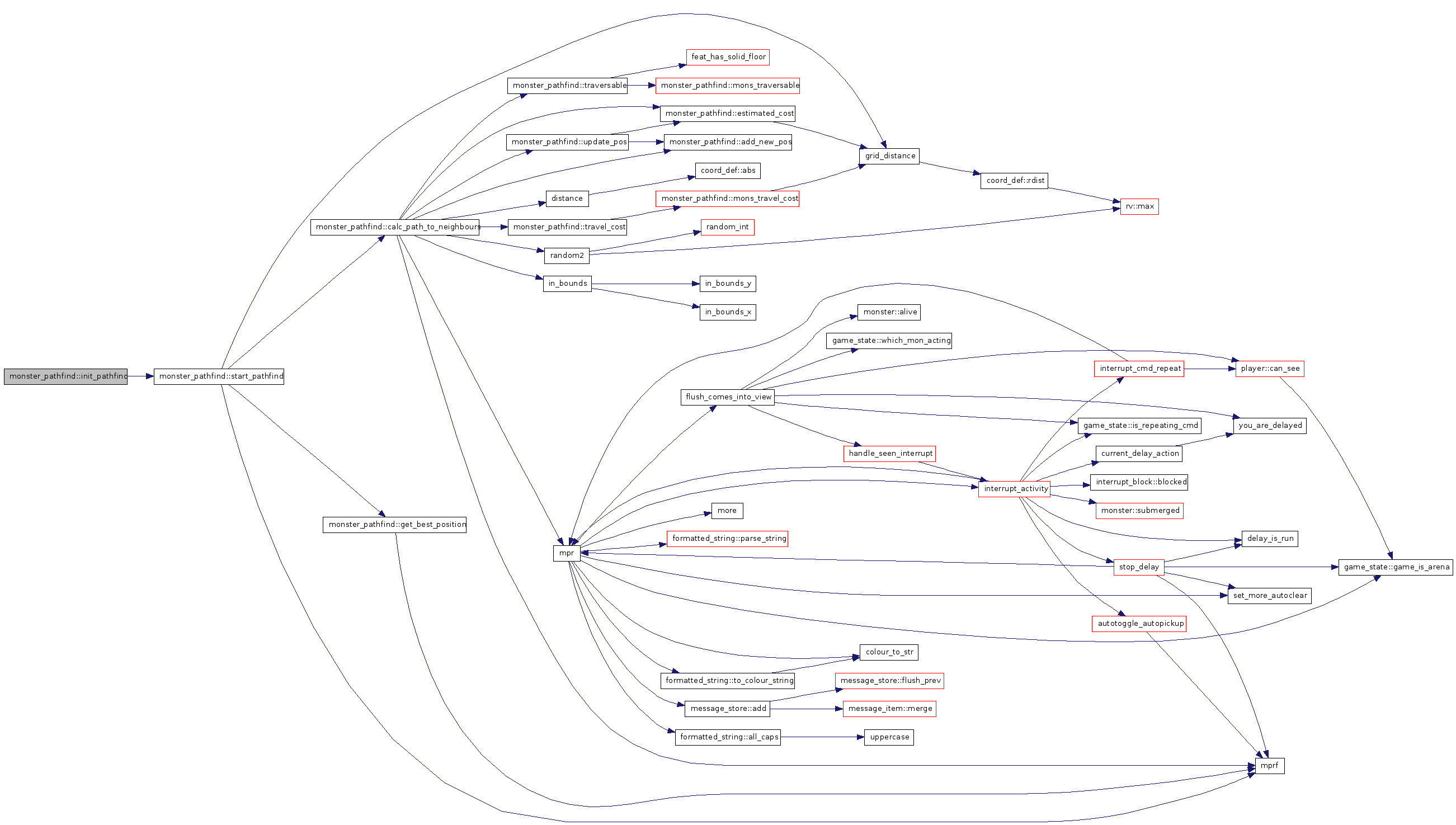
Here is the call graph for this function:
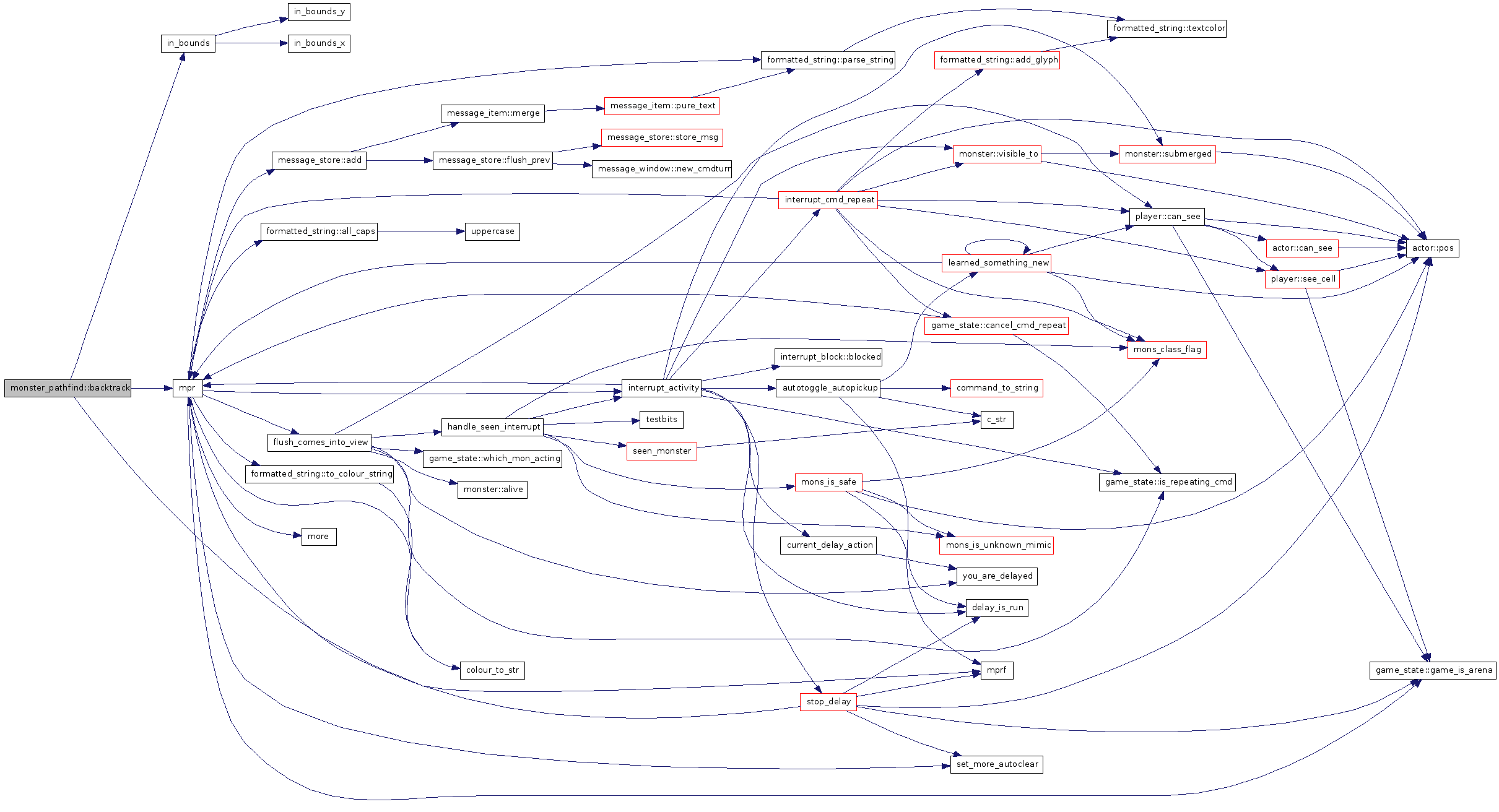
| std::vector< coord_def > monster_pathfind::backtrack | ( | void | ) |
Here is the call graph for this function:
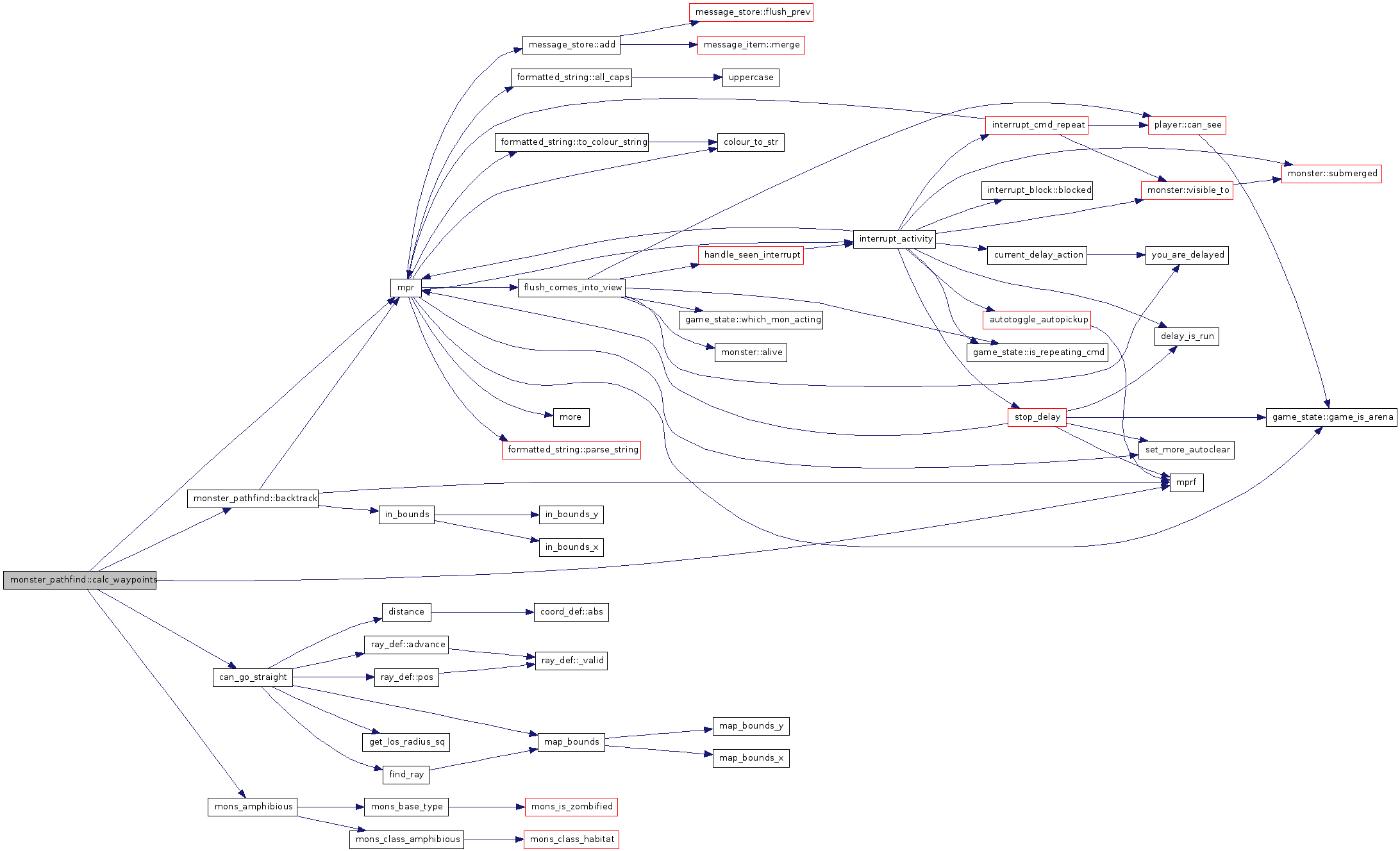
| std::vector< coord_def > monster_pathfind::calc_waypoints | ( | void | ) |
Here is the call graph for this function:
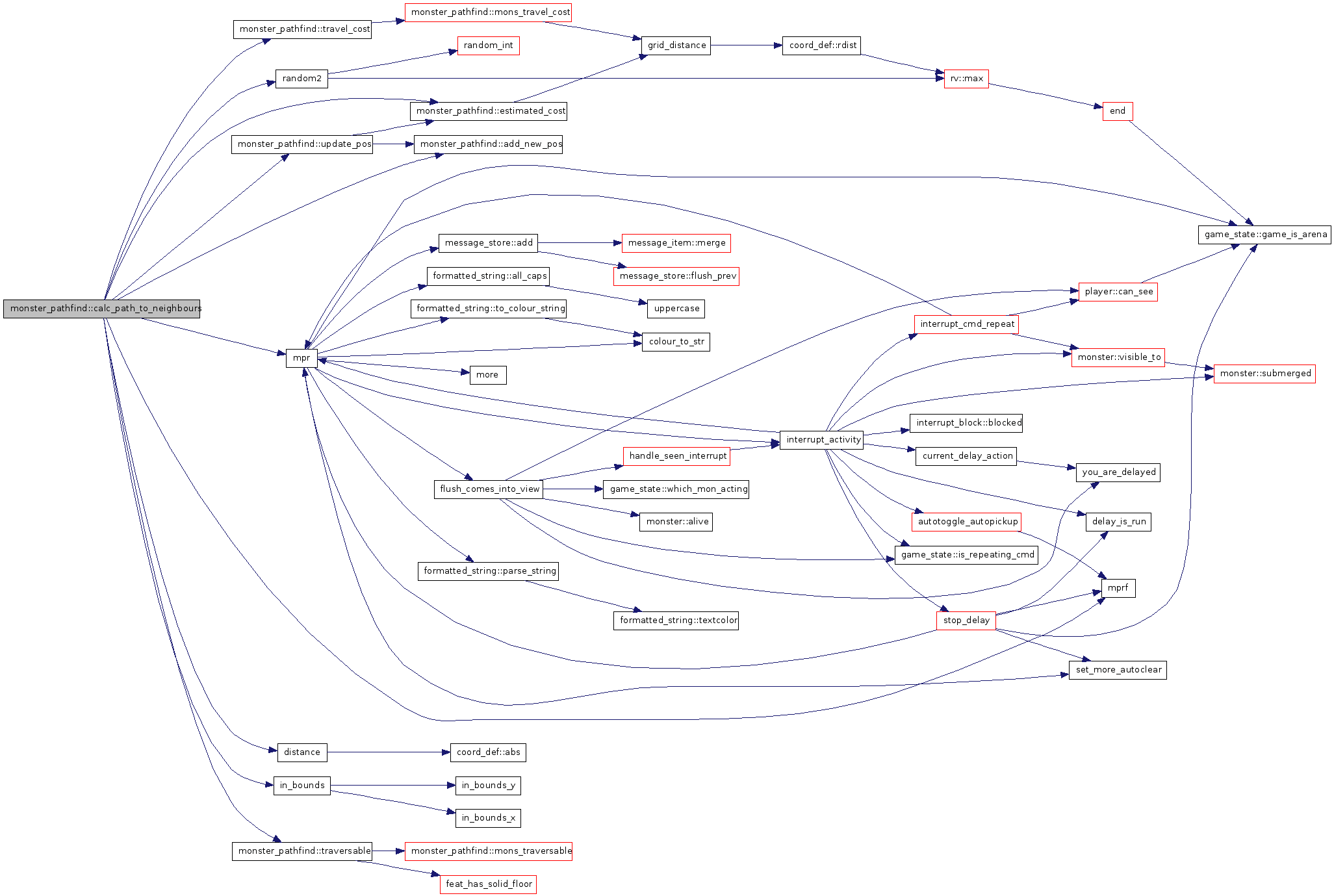
| bool monster_pathfind::calc_path_to_neighbours | ( | void | ) | [protected] |
Here is the call graph for this function:
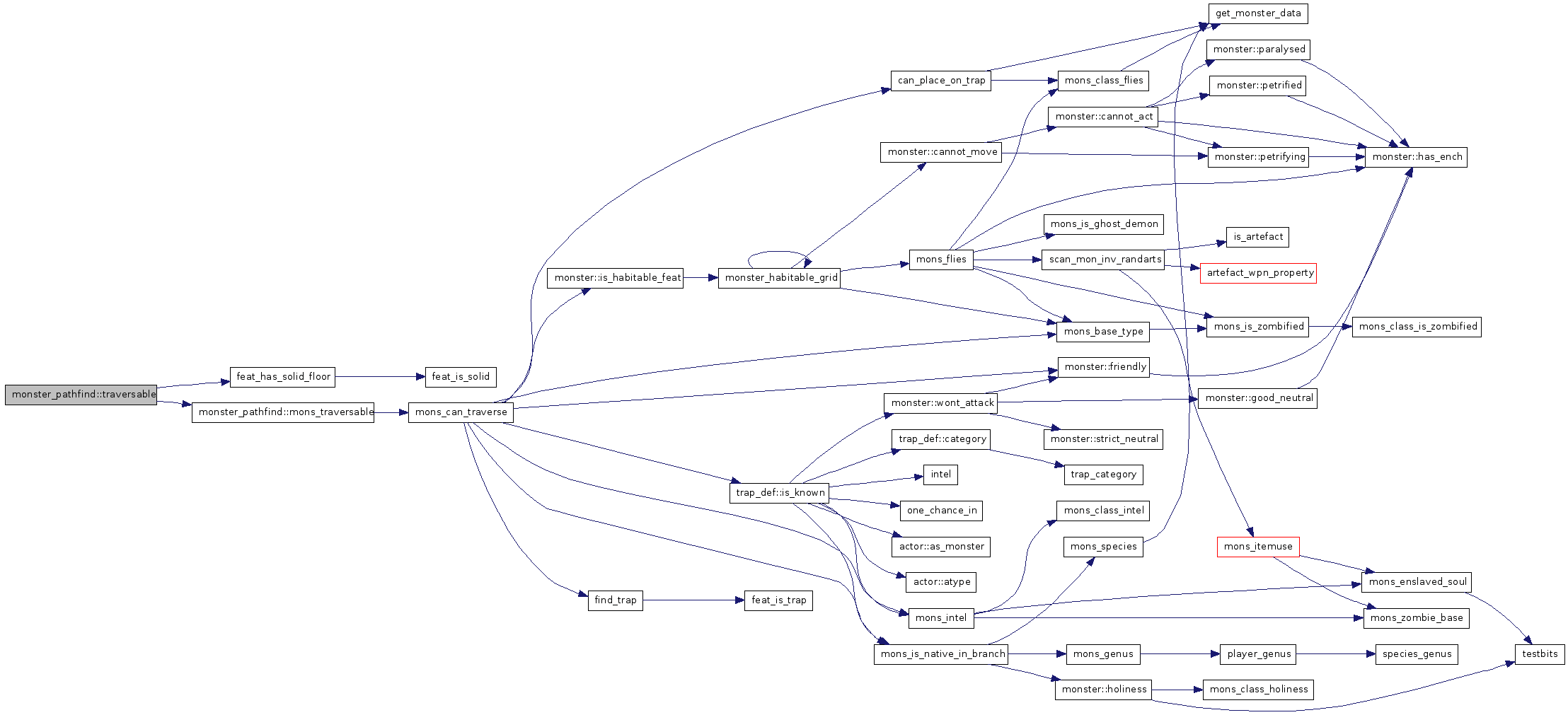
| bool monster_pathfind::traversable | ( | const coord_def & | p | ) | [protected] |
Here is the call graph for this function:
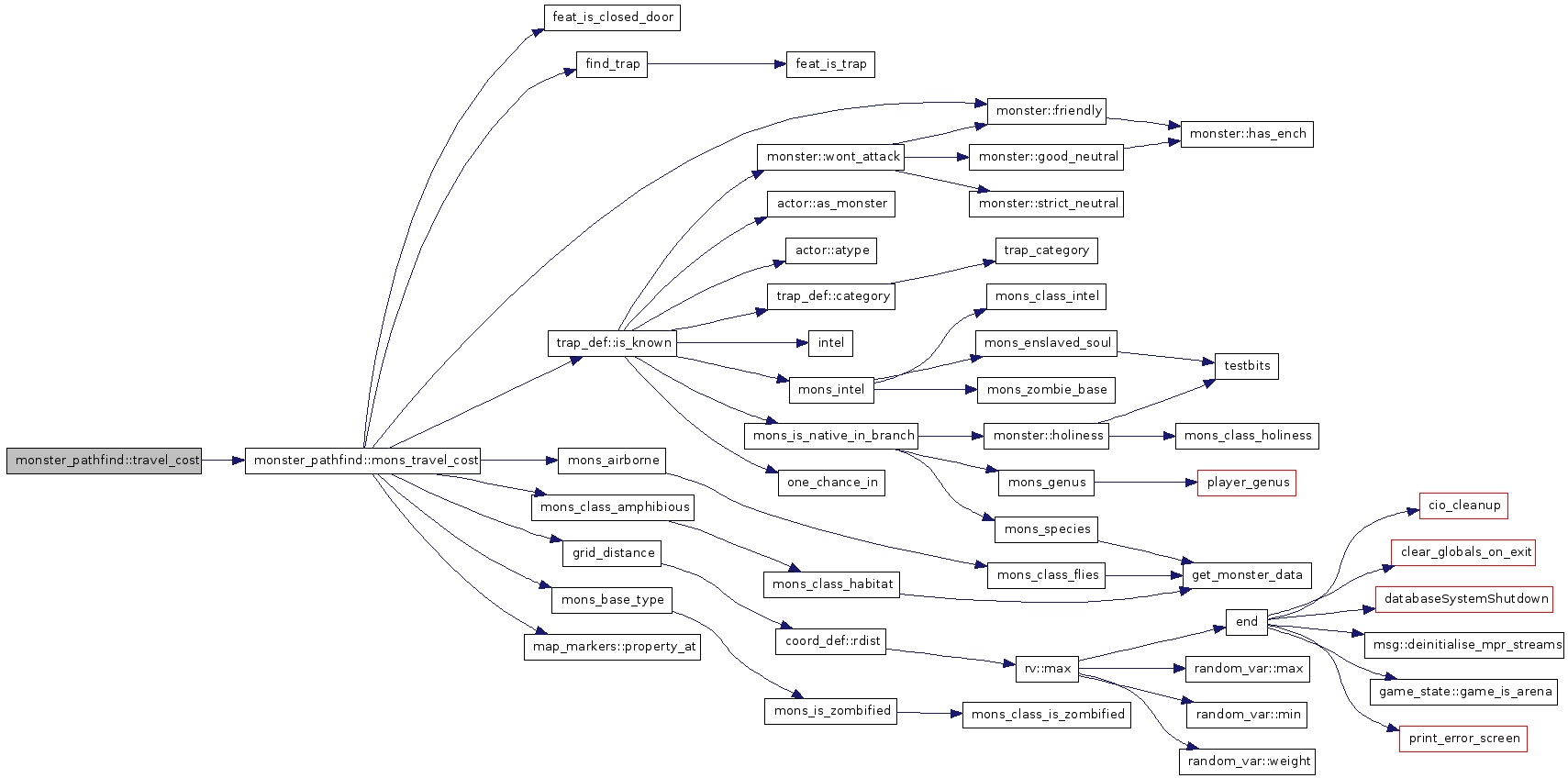
| int monster_pathfind::travel_cost | ( | coord_def | npos | ) | [protected] |
Here is the call graph for this function:
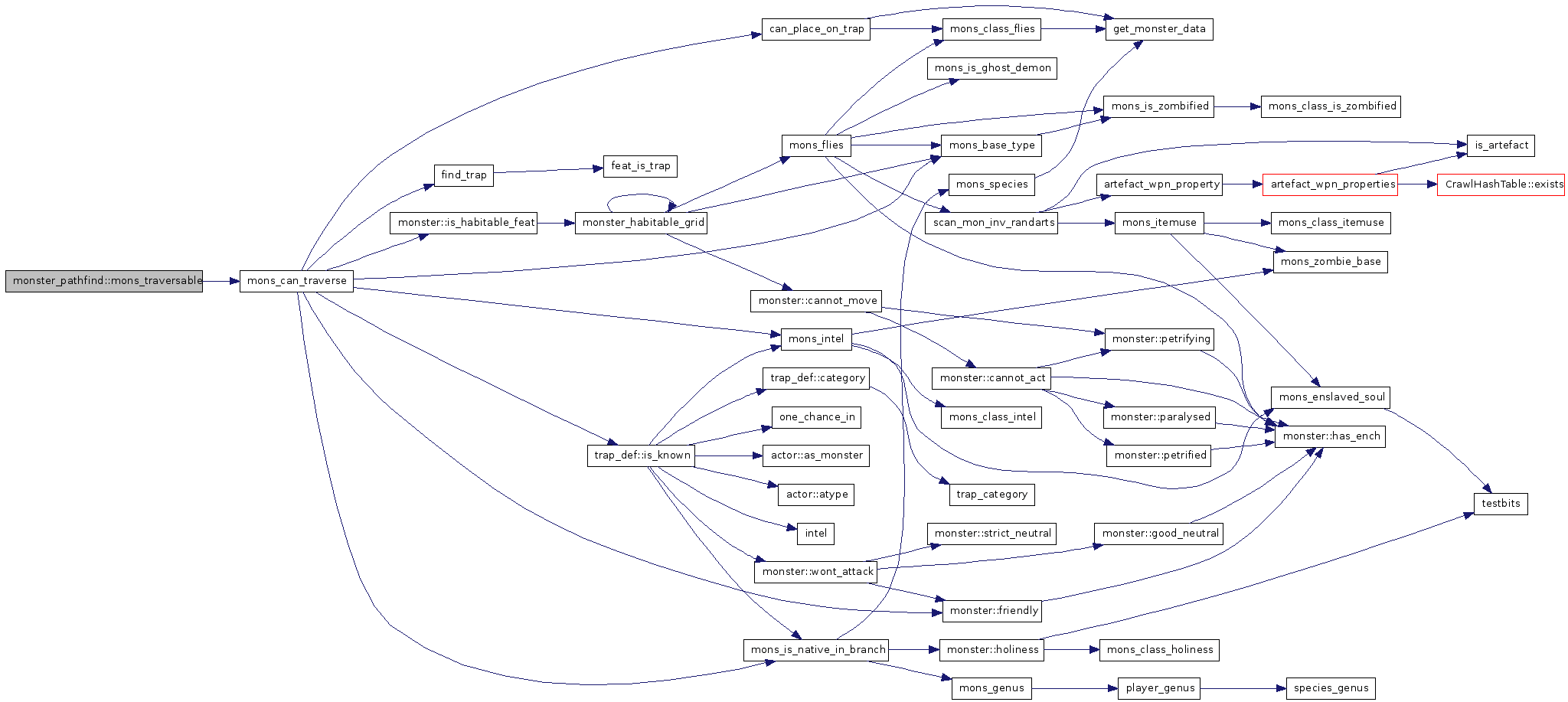
| bool monster_pathfind::mons_traversable | ( | const coord_def & | p | ) | [protected] |
Here is the call graph for this function:
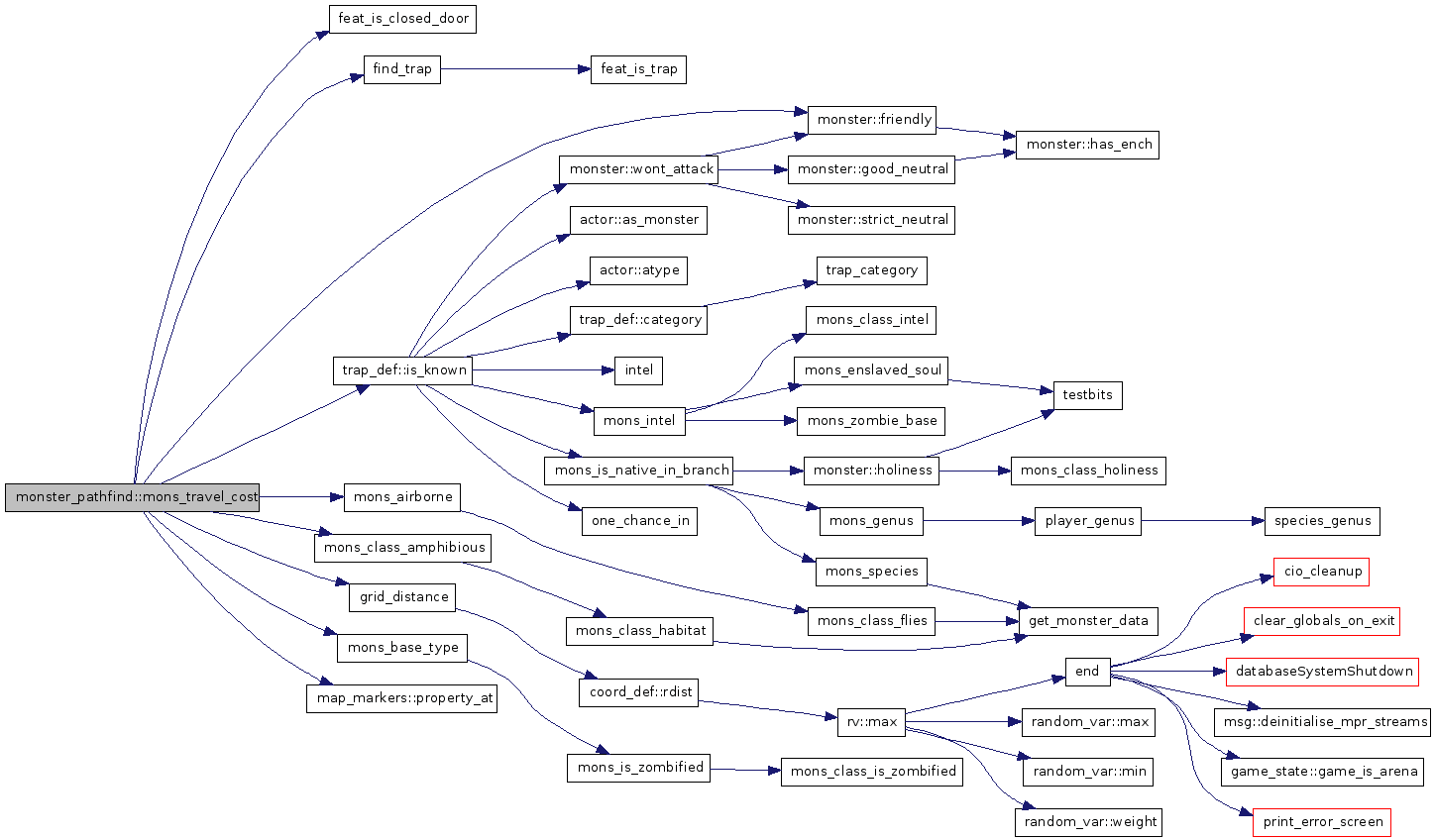
| int monster_pathfind::mons_travel_cost | ( | coord_def | npos | ) | [protected] |
Here is the call graph for this function:
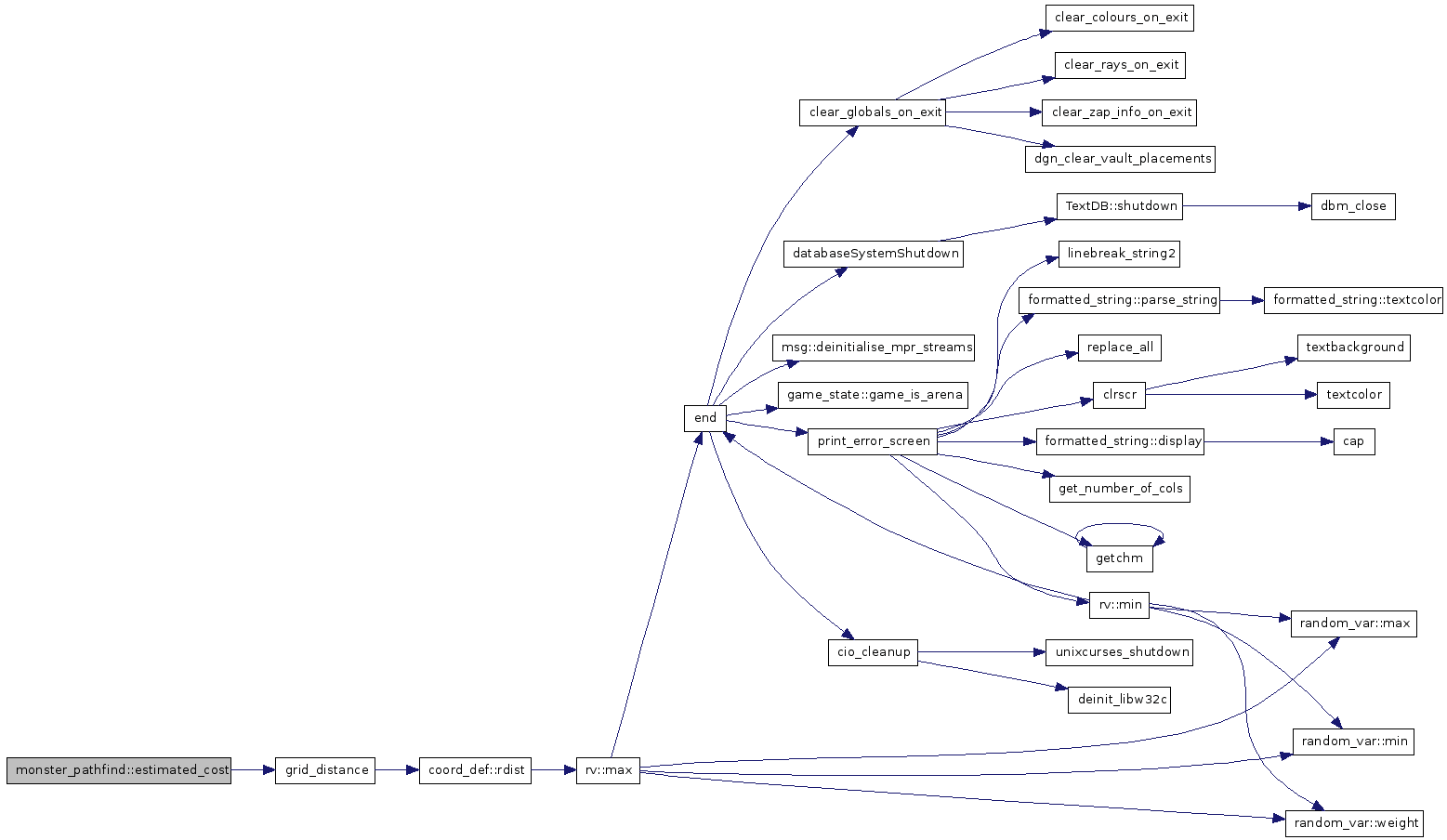
| int monster_pathfind::estimated_cost | ( | coord_def | npos | ) | [protected] |
Here is the call graph for this function:
| void monster_pathfind::add_new_pos | ( | coord_def | pos, | |
| int | total | |||
| ) | [protected] |
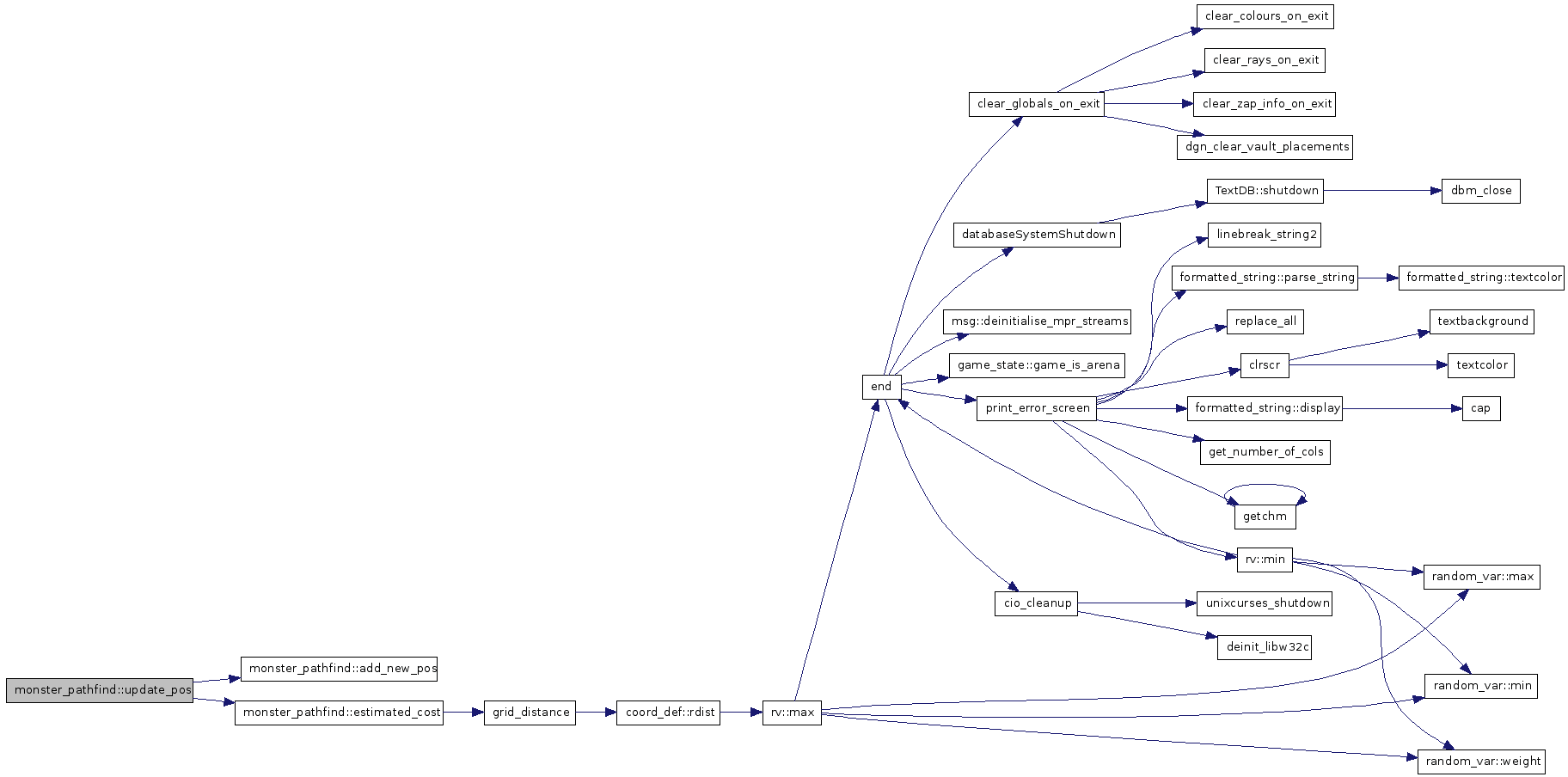
| void monster_pathfind::update_pos | ( | coord_def | pos, | |
| int | total | |||
| ) | [protected] |
Here is the call graph for this function:
| bool monster_pathfind::get_best_position | ( | void | ) | [protected] |
Here is the call graph for this function:

Member Data Documentation
const monster* monster_pathfind::mons [protected] |
coord_def monster_pathfind::start [protected] |
coord_def monster_pathfind::target [protected] |
coord_def monster_pathfind::pos [protected] |
bool monster_pathfind::allow_diagonals [protected] |
bool monster_pathfind::traverse_unmapped [protected] |
int monster_pathfind::range [protected] |
int monster_pathfind::min_length [protected] |
int monster_pathfind::max_length [protected] |
int monster_pathfind::dist[GXM][GYM] [protected] |
int monster_pathfind::prev[GXM][GYM] [protected] |
FixedVector<std::vector<coord_def>, GXM * GYM> monster_pathfind::hash [protected] |
The documentation for this class was generated from the following files: